2010年帰還へ 探査機『はやぶさ』の軌跡


ある探査機の遥かな旅
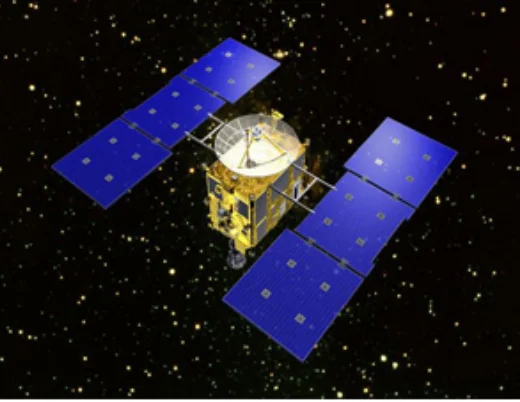 『はやぶさ』のイメージイラスト(提供:宇宙航空研究開発機構(JAXA))
『はやぶさ』のイメージイラスト(提供:宇宙航空研究開発機構(JAXA))
参考:JAXAホームページ
『はやぶさ』プロジェクトサイト・『はやぶさ』物語・宇宙研物語・JAXAプレスリリース
2003年5月9日,鹿児島県旧内之浦町(現・肝属郡肝付町)。日本の固体燃料ロケットM-V-5号機が打ち上げた工学実験探査機を覚えていますか?
開発名称はMUSES-C。大きさは本体部分がおよそ1メートル×1.6メートル×1.1メートル。太陽電池パドルを展開すると端から端までの幅が約6メートル。質量は燃料も含めて510kg。以前ここでご紹介したHTVよりも,アメリカのスペースシャトルよりも,地球の静止軌道上で現在運用中の気象衛星ひまわり6号(燃料込み3.3トン)よりもずっと小さな探査機ですが,約2年4ヶ月の後には地球から約3億2000万キロメートルに達し,ある小惑星に着陸,サンプル採集を試みた後離陸して,現在地球への帰途にあります。
少し意地悪な訊き方だったかも知れませんが,もうお解りですね。文部科学省宇宙科学研究所:ISAS(当時。現・独立行政法人宇宙航空研究開発機構:JAXA)の第20号科学衛星『はやぶさ』。 11月初めにエンジントラブルが発生し,一時帰還が危ぶまれましたが,JAXAスタッフの方々の粘り強い運用努力が奏功し,12月10日現在,地球に向かって加速を続けています(地球までの距離は約1億キロメートルです)。
今年最後となる今回のホットニュースでは,帰還運用の再開を祝いながら,順調に行けば来年,2010年夏に地球に戻って来る予定の『はやぶさ』のこれまでとこれからを,纏めてお伝えします。
小惑星からサンプルを持ち帰りたい ― その計画の始まりは『はやぶさ』打ち上げの10年以上前に遡ります。
小惑星とは太陽系内にある天体のうち,太陽自体や惑星・準惑星・彗星を除いた比較的小さなものの総称です。太陽系の形成についてはここでは割愛しますが,小惑星や彗星は太陽系が誕生した際,惑星に成長したり取り込まれたりすることなく取り残された,謂わば残骸のような天体です。太陽系形成当時の情報は,惑星上では大気やプレートなどの運動によって掻き乱され,やがて失われてしまいます。一方で小惑星や彗星では,情報を乱す原因が少ないため,より多くの情報が残されいることが期待されます。
小惑星まで探査機を飛ばし,構成物質を採取して地球に持ち帰る。計画が最初に俎上に載せられた1980年代中盤当時,日本は国内としては初めての惑星間空間探査機『さきがけ』をハレー彗星に向けて打ち上げることに成功したばかりでした。惑星間空間探査機とは,地球の軌道から離れ,太陽の周りを回る軌道に乗る探査機のことで,他の惑星や彗星,そして小惑星の探査を目的とします。
その技術を初めて手にしたばかり,しかも彗星より遥かに遠方の小惑星に向かう為には経験も,ロケットの打ち上げ能力そのものも足りないこの段階での計画は,探査プロジェクトとして立ち上げるには,未だ時期尚早でした。
しかしそこから,惑星間飛行や小惑星とのランデブーなど,技術開発とその試験を目的とした工学衛星計画としてMUSES-Cは具体化されて行きます。
『はやぶさ』が実現を目指し,実際に搭載された技術は大きく分けて4つ。第1はイオンエンジンをメインの推進機関としての惑星間航行。次に,『はやぶさ』自身が周囲の状況を光学的に観測しての,自律的な航法と誘導。そして,小惑星表面からの物質の採取。更には,惑星間軌道から地球の大気圏への直接再突入によるサンプルの回収です。
目的地となる小惑星は打ち上げのタイミングなどに合わせて何度か変更されましたが,最終的に1998年に発見された小惑星1998SF36に決定されました。1998SF36はその後,日本のロケット開発の先駆者として知られる故・糸川英夫博士に因み『イトカワ』と命名されています。
『はやぶさ』4つの大きな挑戦
 『はやぶさ』のフライトモデル(提供:宇宙航空研究開発機構(JAXA))
『はやぶさ』のフライトモデル(提供:宇宙航空研究開発機構(JAXA))イオンエンジンは『はやぶさ』の推進力の主軸です。
例えば日本のH-Ⅱシリーズなど,各国のロケットの多くが採用しているエンジンは化学推進エンジンと呼ばれ,搭載している推進剤をエンジン内で燃焼させ,高温・高圧のガスとして直接噴出させる方法で推力を得ます。得られる推力は単位時間あたりの噴射質量と噴射速度から求められます。
化学推進エンジンの利点は短時間の燃焼で大きな推力が得られること,難点は他のタイプのエンジンと比べて効率が悪く,大量の推進剤を積む必要があることです。真空中では燃焼に必要な酸素を得ることができないため酸化剤も必要です。推進剤や酸化剤を途中で補給できれば良いのですが,補給なしで長時間飛び続ける必要のある衛星や探査機には適しているとは言えません。
『はやぶさ』のイオンエンジンでは,マイクロ波を使って推進剤のキセノンを陽イオンに電離させ,電場を掛けて加速します。化学エンジンと比べて10倍以上の速度で噴射でき効率が良い反面,イオンは非常に軽いため,大きな推力は得られません。補うには長時間に渡って噴射を続ける必要があります。また,陽イオンはプラスの電荷を持っているため,そのまま噴射すると機体がマイナスに帯電し,折角噴射したプラスイオンと引き合って進めなくなってしまいます。防ぐにはイオンと同じ電荷量の電子を,噴射前のイオンに与えて電気的に中和しなければなりません。
『はやぶさ』は予備1基を含めた4基のイオンエンジンを搭載し,推進の他,イトカワへの離着陸・地球スウィングバイなどに使用しました。スウィングバイは天体の重力を利用して探査機の軌道や速度を変更する技術で,イオンエンジンとスウィングバイの組み合わせは世界でも初めての成功です。
自律的な航法と誘導は,地球から遠く離れて飛行する深宇宙探査機には不可欠の技術です。地球と探査機の交信は電波で行いますが,距離が離れれば離れるほど,交信に掛かる時間は長くなります。
イトカワに到着する頃の『はやぶさ』は,地球からおよそ3億キロ,地球から太陽までの距離の約2倍の彼方を飛行しており,交信に掛かる時間は往復で約30分。いちいち地球からの指示を待っていたのでは,イトカワ表面への接近に当たっての航路の調整や,それに伴って起こるかも知れない危険を回避するにはあまりに遅すぎます。
『はやぶさ』は着陸に先立って,イトカワ表面に接近・着陸の目標となるターゲットマーカーを放出しました。ターゲットマーカーは『はやぶさ』が発するフラッシュを反射して光り,『はやぶさ』が自身の水平位置を検出するための灯台の役割を果たしました。このターゲットマーカーにはミッションに賛同した149ヶ国88万人の名前が刻まれています。
イトカワからのサンプルの採取は,探査機下部のサンプル採取器(サンプラーホーン)で行われました。イトカワの重力は地球や月などと比べて極めて小さいため,直接地表を削ろうとしても反動で『はやぶさ』の方が動いてしまい巧く行きません。そこで考え出されたのが,サンプラーホーンがイトカワに接地すると同時に,イトカワの表面に向けて重さ5グラムの金属球を発射し,これによって生じた表面の破片をホーンを通じて採集容器へ取り込むという独創的な方法でした。
イトカワの上空にホバリングし,降下,接地の後素早くサンプルを入手する。この一連の流れは,鳥のハヤブサが空中から地上の獲物を狙い,捕える様子に良く似ています。
現在帰路にある『はやぶさ』ですが,最後の任務はサンプルが入っている可能性のある採集容器を地球に送り届けることです。容器は重量16キロ,直径約40センチの再突入カプセルの中に収納されており,『はやぶさ』の大気圏再突入の直前(※1)に機体本体から分離されます。惑星間軌道から直接の再突入のため,この時のカプセルの落下速度は秒速12km(東京-名古屋間を約25秒)にもなります。
空気中を物体が運動するとき,物体が押し除けようとする空気は圧縮され,それに伴って温度が上昇します。これを空力過熱といい,物体の飛行速度が高速になるほど圧縮の度合いは大きく,従って温度は高くなります。今回の場合カプセルが小さいこともあり,再突入時の周囲の大気の温度は最大で1~2万度まで上昇します。
この高熱からカプセルを守るのが,炭素繊維と合成樹脂からつくられた強化プラスチック製の断熱材(アブレータ)です。アブレータは加熱によって炭化し,溶融分解してカプセルの表面を覆うガスの膜を作ります。周囲の高温の大気はこのガスに遮られ,カプセルに直接触れることはありません。
落下時の空気抵抗によってカプセルは次第に減速します。高度約10キロメートルまで降下するとパラシュートが開き,更に速度が下がります。
『はやぶさ』再突入カプセルは,2010年6月にオーストラリア,アデレードの北約500キロのウーメラ砂漠に帰還する予定となっています。
※1 打ち上げ当初の計画では大気圏再突入の約8時間前にカプセルを分離させ,『はやぶさ』本体は惑星間空間に戻されて太陽の周りを周回する,謂わば人工惑星になる筈でした。しかし現状の『はやぶさ』はエンジンの故障などにより微妙な姿勢制御が難しくなっています。分離のタイミングを遅らせた場合,機体は地球の重力に捕らわれるため失われてしまいますが,カプセルを目的の位置へより正確に降下させられる可能性が高くなります。
『はやぶさ』の2500日+α 打ち上げから帰還,後継計画まで(1)
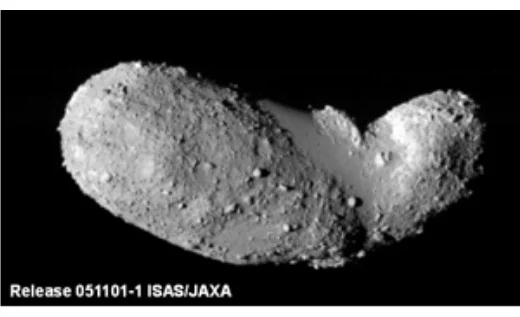 イトカワの+90度面(提供:宇宙航空研究開発機構(JAXA))
イトカワの+90度面(提供:宇宙航空研究開発機構(JAXA))
『はやぶさ』による撮影。
中央やや右寄り,岩がなく平坦に見える部分が『ミューゼスC領域』。
多くの新しい技術,長きにわたる航行距離と航行時間。
これまでに数多くの成果を上げて来た『はやぶさ』は,一方でミッションの継続自体が危ぶまれるほどの窮地にも直面して来ました。
2003年5月9日13時29分25秒,打ち上げられたMUSES-Cは予定通りの惑星間軌道に投入され『はやぶさ』と名づけられます。
打ち上げの直後,予備を含めて4基搭載されていたイオンエンジンスラスターAからDのうちAの動作が不安定であることが判ったため,運用が停止されました。残りのB・C・Dは当初から順調に作動しており,世界初のイオンエンジンの3基同時運転を達成しています。翌2004年3月には地球スウィングバイに向け,精密な軌道計算のために一旦エンジンを停止。スウィングバイが成功しイトカワへ向かう軌道に乗った後,再びB・C・D3基の運転を再開しイトカワへ向けて加速しました。
2005年7月,3基の姿勢制御装置のうち1基が故障したため,残り2基での運用に切り替えられました。1基の故障は事前の想定範囲内であり,イトカワへの接近やサンプル採集の計画には支障はないものとされました。
同年7月から8月に掛けて『はやぶさ』は直接イトカワの姿を捉え,写真を地球に送って来ました。地上の電波観測による情報と合わせ,より精密な軌道計算を行うためです。
そして2005年9月12日,日本時間午前10時。『はやぶさ』は遂にイトカワに到着しました。未だ地表に降りた訳ではありませんが,イトカワまでの距離20キロメートルに達し,イトカワに対して静止したのです。搭載カメラで撮影されたイトカワの姿は細長く湾曲しており,水面に浮かんだラッコのようにも見えました。
『はやぶさ』はその位置に暫く留まり,イトカワのほぼ全球に渡るマッピングを行った後,9月30日には高度を下げて,イトカワの上空7キロメートルに到りました。
ところがその後10月に入って,2基目の姿勢制御装置に異常が見つかります。残った1基と姿勢制御用の化学エンジンで姿勢は維持できましたが,予定外のところで化学エンジンを使用することとなったため,燃料の確保が急務となりました。この問題は化学エンジンの噴射制度を上げることで解決しています。
11月4日,イトカワへの降下に向けた第1回のリハーサルが行われました。しかし途上で自律航行機能に異常が検出され,高度700メートルで降下は中止されました。姿勢制御装置が1基になってしまったことで機体の揺れが大きくなったこと,イトカワを捉えた『はやぶさ』の画像処理能力に問題が起きたことなどが原因でした。またこの時の撮影により,着陸候補地のうちの1ヶ所で10メートル強の大きな岩石が複数確認され,安全な着陸には適していないと判断されました(※2)。
11月9日の再リハーサルでは,高度70メートルまでの降下とターゲットマーカー分離,更にはマーカーへのフラッシュの照射に成功しました。このマーカーは88万人の署名の入ったものとは別で,イトカワの表面には達していません。
11月12日には高度55メートルまで降下して探査ロボット『ミネルバ』を分離しました。『ミネルバ』には小型のカラーカメラとイトカワ表面の温度を測定するための温度計が装備されており,重力の小さいイトカワの表面を跳ねるように移動しながら探査することになっていました。しかし地球から分離のコマンドが送られてから『はやぶさ』が受信するまでの間に,イトカワに対する『はやぶさ』の高度が高くなりすぎてしまっており,『ミネルバ』はイトカワ表面に留まることができませんでした。カメラなど装置の状態は良好で,『はやぶさ』本体の太陽電池パネルのカラー撮影に成功しています。
そして11月20日,『はやぶさ』は,イトカワ表面,砂礫の広がる『ミューゼスC領域(ミューゼスの海)』に着陸を果たしました。名前入りのターゲットマーカーが先に降下し,予定通り『はやぶさ』を誘導しました。
この途中高度10メートルまで降下したところで高度計のデータが変化しなくなり,およそ30分に渡って『はやぶさ』の状況が判らない状態が続きました。着陸に成功していたと判ったのは,地上からの指令でイトカワから離陸した後のことです。
『はやぶさ』はサンプラーホーンを下にしてイトカワの表面でバウンドした後着陸し,イトカワ上に約30分留まっていました。降下中に何らかの障害物が検出されたためサンプルの採取は行われませんでしたが,この時点で『はやぶさ』は月以外の天体に着陸の後離陸した最初の人工物となりました。
11月26日には再度の着陸と,サンプル採取のための金属球の発射が行われました。後の解析で金属球発射が途中で中断された可能性があることが判り,採集の結果は地球帰還後まで持ち越しとなりましたが,2度の着陸の衝撃などで採取できている可能性はあるという見方もあります。
※2 イトカワの表面は,砂礫に覆われて比較的平坦な部分と,大きな岩が転がる部分とにはっきり分かれていました。このような姿は予想外で,特に岩の成因は大きな謎です。地球の岩石よりも密度が低く,極端に表現すれば「すかすか」であることやラッコのような形状も何故こうなったのかは解っていません。イトカワの形成史を理解するためにも,サンプルは重要な役割を果たすと期待されています。
『はやぶさ』の2500日+α 打ち上げから帰還,後継計画まで(2)
 『ヒートシールドを分離し緩降下中のカプセルのイメージイラスト
『ヒートシールドを分離し緩降下中のカプセルのイメージイラスト(提供:宇宙航空研究開発機構(JAXA))
断熱材部分を分離後パラシュートで降下する。
同じ11月26日。イトカワ表面から上昇し,姿勢の変更を行っていた『はやぶさ』にトラブルが起きました。姿勢制御用化学エンジンの燃料漏れです。地上からの指示で燃料弁を閉じて漏洩は止まりましたが,翌日には化学エンジンの推力が低下,更に翌日には地上との通信もできなくなりました。
11月29日,低利得アンテナによるビーコン通信が回復し,『はやぶさ』の状況を少しずつ確認できるようになりました。化学エンジンが不調となり,姿勢がずれてパラボラ状の高利得アンテナが地球方向を外れてしまったことが判ったため,イオンエンジン用のキセノンガスを直接噴射する方法で緊急の姿勢制御が行われました。
12月8日,再度の燃料漏れが発生し,機体外に吹き出した燃料などの影響により『はやぶさ』の姿勢は再び大きく乱れました。翌日には通信が再び途絶え,機体の状況が判らなくなります。
『はやぶさ』は受動的に安定する設計となっており,現在位置もイトカワとほぼ同じ軌道上で変わってはいない筈 ― 燃料漏れによる擾乱が収まれば,高い確率で通信は復旧すると信じて,救出運用が始まりました。長野県佐久市,臼田宇宙空間観測所の64メートルパラボラアンテナを,向こう半年から1年の間イトカワに向け,『はやぶさ』の捕捉を目指すことになりました。
通信が途絶えている間,或いは復旧のための点検や作業を行う間にイトカワと地球の位置関係が変わってしまうため,当初予定されていた2007年の地球帰還を諦め,再び位置関係が良くなる3年後の2010年まで運用を延長することも決まりました。
2006年1月23日,遂に『はやぶさ』の信号が捉えられました。しかし『はやぶさ』の姿勢は大きく乱れ,地球とはずれた方向を軸にして回転してしまっていました。太陽電池の発生電力が極端に低下し,リチウムイオンバッテリーは放電しきっていました。バッテリの11のうち4つのセルは過放電で故障し,使用不能になっていました。化学エンジンの推進剤は12月の時点でほとんど漏れて失われていましたが,酸化剤も新たに漏洩し,残量はほぼなくなっていると思われました。
しかし幸いイオンエンジン用のキセノンガスは十分残っていたため,11月の時と同じくキセノンの直接噴射によって姿勢は少しずつ回復しました。『はやぶさ』から十分な情報が届くようになり,再び軌道の計算ができるようになったのは3月6日のことです。この時『はやぶさ』は地球から約3億3000万キロメートル,イトカワからは1万3000キロメートルの位置にいました。
『はやぶさ』の発見に伴い,地球への帰還準備が始まります。先ずは探査機内に零れた化学エンジンの推進剤などを追い出すため,ヒーターを使って機内の温度を上げ,蒸発させる『ベーキング』が行われました。イオンエンジンの起動試験にも成功,姿勢制御に流用していたキセノンガスの節約のため,太陽の光圧を使った新たな姿勢制御方法(※3)も考案されました。
イトカワのサンプルの入っている可能性のある採集容器をカプセル内に収容するためには,リチウムイオンバッテリーの電力が必要でした。一部のセルの故障という不安を抱えながらも再充電は成功し,容器は無事にカプセルに収納されました。
複数回のイオンエンジンの試験運転を経て,『はやぶさ』が地球に向けてイトカワを離脱したのは2007年4月25日のことです。
イトカワを離れる直前にスラスターBの中和器が故障したため,『はやぶさ』は当初復旧していたスラスターDを,途上でCが復旧して以降は,2つを交互に運転してきました。姿勢の制御は3基のうち唯一残った姿勢制御装置に,イオンエンジンの噴射方向調整機構,太陽光圧を合わせて利用しています。リチウムイオンバッテリーは採集容器格納後,電力が低下しており,現在は使われていません。
2009年11月4日,スラスターDが中和器の劣化のため自動停止しました。Cについては起動できることが確認されたものの,こちらも劣化の傾向が見られました。地球帰還に向けて軌道変更(エンジンによる加速)を行っていた途上でもあり,一時は帰還自体も不安視されました。
これに対して採られた対策は,既に停止していたスラスターAとBから,故障していない部品同士を繋ぎ合せてスラスター1基分の推進力を確保するというものでした。スラスター同士が万一に備え電子回路で繋がれていたこと,Aではイオン源,Bでは中和器とそれぞれ別の部分が故障したことも幸運でした。キセノンと電力の消費は2倍になりますが,今のところ問題はないようです。
順調に行けば『はやぶさ』は2010年6月に地球に戻ってきます。カプセル降下後機体は大気圏で消滅の予定ですが,最近になって地球大気との衝突コースを追跡することで,地球に衝突する可能性のある小天体の追跡プログラムの開発に役立てるという新たなミッションが加わりました。
現在『はやぶさ』の後継として,新たな小惑星のサンプルリターンが計画されています。イオンエンジンの改良や,アンテナの変更による通信能力の向上などが予定され,イトカワより有機物を多く含んだ小惑星をターゲットとすることで,太陽系空間の有機物の調査,ひいては地球の生命との関係に迫ることを目標としています。『はやぶさ』カプセルの到着を待ちながら,2014年の打ち上げを目指す後継計画にも注目していきたいところです。
※3 太陽など恒星の放射する光子を鏡面状の帆で反射させると,光子のエネルギーが帆の運動量に変換され,光子の進行方向に帆を押す力が発生します。これをソーラーセイル(太陽帆)と呼んでいます。化学エンジンやイオンエンジンと比べ遥かに小さな推進力ですが,燃料が必要ないため常時連続的な加速が可能で,最終的には化学・イオンエンジン以上の速度を得ることができます。『はやぶさ』の光子による姿勢制御はソーラーセイルの原理を利用したものです。またJAXAでは,2010年に小型のソーラーセイル実証機『IKAROS』の打ち上げを予定しています。
(研究推進課 西村美里)